首页
品牌
排行
问答
专题
特惠
资讯
展会
百科
热门行业
装修建材
家居生活
餐饮食品
母婴教育
电脑办公
服装首饰
汽车工具
家电数码
机械化工
休闲美容
热门行业
教育培训
板材
地板
涂料
家纺
集成吊顶
美缝剂
木门
硅藻泥
管材
指纹锁
橱柜
衣柜
床垫
电热水器
集成灶
暖气片
净水器
酒店
卫浴
装修建材
卫浴洁具
板材
地板
建筑陶瓷
天花板
涂料
瓷砖泥瓦
水电管材
火锅
快餐
生活用品
软装
装饰装潢
灯具
家纺
干洗服务
内衣
男装
女装
幼教
整体卫浴
地板砖
阻燃板
铝材
集成吊顶
美缝剂
硅藻泥
管材
烤鱼
汉堡
叶酸
婴儿用品
婴儿床
指纹锁
品牌首页
品牌资讯
企业信息
商标信息
专利信息
返回上一页
专利状态
一种双末端机械手的晶圆纠偏系统及方法
有效
专利申请进度
申请
2022-06-21
申请公布
2022-10-11
授权
2023-03-21
预估到期
2042-06-21
专利基础信息
申请号
CN202210703600.9
申请日
2022-06-21
申请公布号
CN115167198A
申请公布日
2022-10-11
授权公布号
CN115167198B
授权公告日
2023-03-21
分类号
G05B19/042;H01L21/687;H01L21/68
分类
控制;调节;
申请人名称
沈阳新松机器人自动化股份有限公司
申请人地址
辽宁省沈阳市浑南区飞云路15-1号
专利法律状态
2023-11-24
专利申请权、专利权的转移
状态信息
专利权的转移;IPC(主分类):G05B 19/042;专利号:ZL2022107036009;登记生效日:20231107;变更事项:专利权人;变更前权利人:沈阳新松机器人自动化股份有限公司;变更后权利人:沈阳新松半导体设备有限公司;变更事项:地址;变更前权利人:110168 辽宁省沈阳市浑南新区金辉街16号;变更后权利人:110169 辽宁省沈阳市浑南区飞云路15-1号
2023-03-21
授权
状态信息
授权
2022-10-28
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):G05B19/042;申请日:20220621
2022-10-11
公布
状态信息
公布
摘要
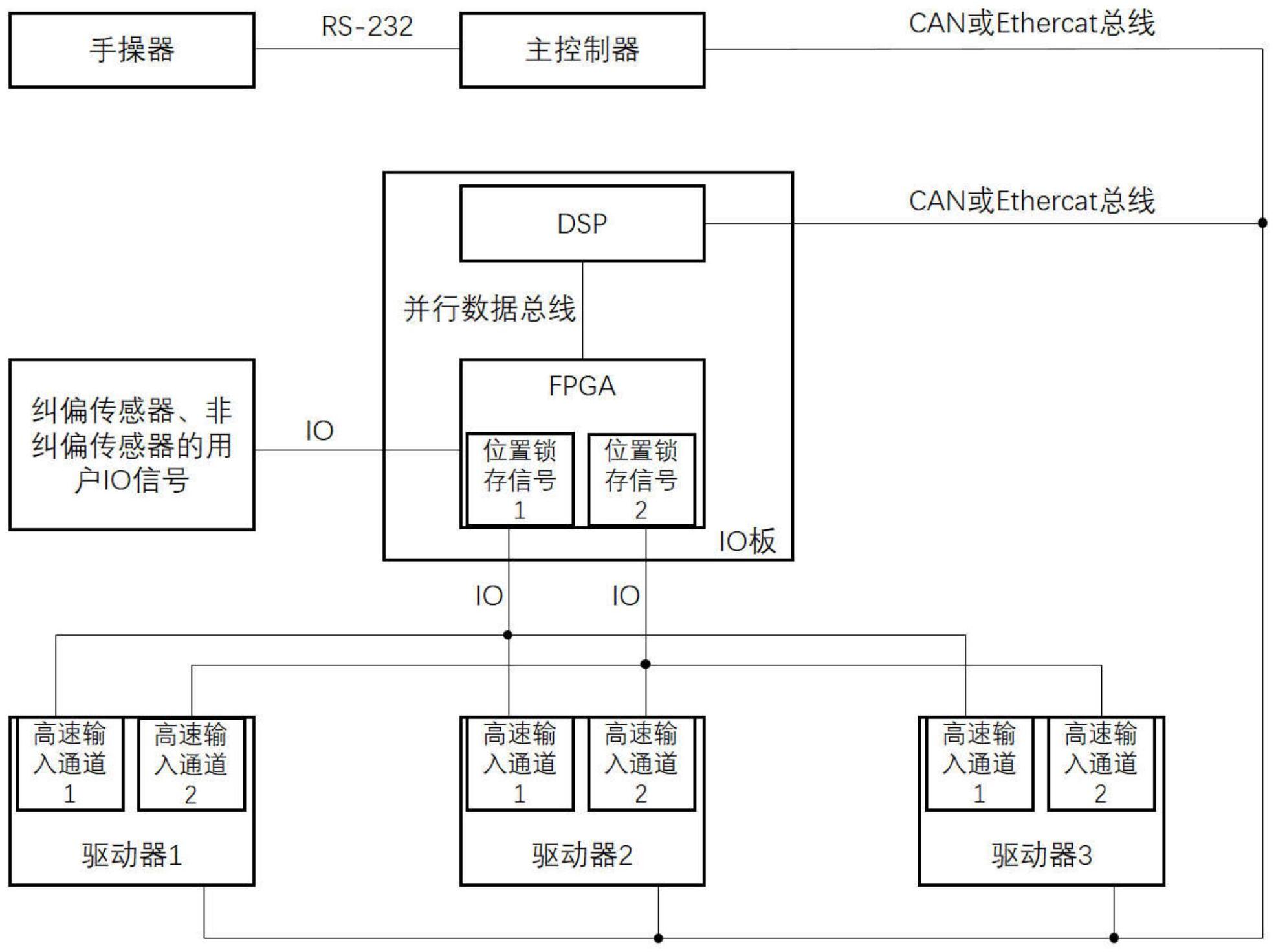
本发明属于半导体制造领域,具体说是一种双末端机械手的晶圆纠偏系统及方法,包括:主控制器、手操器、IO板、驱动器以及纠偏传感器;主控制器,用于接收手操器获取到的纠偏配置数据,并通过总线发出纠偏配置数据到IO板;主控制器还接收驱动器读取到的晶圆位置数据,并根据晶圆位置数据获取晶圆的实际位置,计算偏差值;IO板,用于接收主控制器发送的纠偏配置数据,同时,采集纠偏传感器对应的IO点的状态,并进行判断,若发生变化,生成双末端机械手的位置锁存信号发送至驱动器对应的输入通道。本发明解决了双末端机械手两个末端晶圆位置数据混淆的问题,实现双末端机械手晶圆纠偏,提高晶圆传输效率和位置准确度。
更多专利
1
一种服务型机器人底盘防碰撞结构
2
一种机器人防坠落工装
3
一种用于机器人同步控制的交叉耦合控制方法
4
一种全自动造粒设备
5
一种具有自主救援功能的四向穿梭车系统
6
一种悬吊装置
7
一种新型履带式机器人
8
一种多自由度阻尼式机械臂
9
一种粉盘摩擦力可调的送粉器
10
一种智能化直卸式垃圾箱
11
一种移动开门装置
12
一种小臂锁定型机器人防坠落工装
13
一种喷油器电磁铁自动装钢球拧螺钉装置
14
一种服务机器人底盘防跌落阵列装置及防跌落方法
15
一种机器人头部运动机构
16
一种机器人底盘全向防碰撞结构
17
一种剪叉式外导向超长堆垛机
18
一种钢丝绳预拉伸装置
19
电动站立助行器
20
一种机器人的标定工件
全国服务热线:
在线客服
1211389656
咨询
商务合作
85926368
咨询
媒体合作
921888730
咨询
在线客服
客服微信号
品牌网官方客服微信
打开微信扫一扫
客服微信
商务合作微信
商务合作详谈
打开微信扫一扫
商务合作
回到顶部
 教育培训
教育培训