首页
品牌
排行
问答
专题
特惠
资讯
展会
百科
热门行业
装修建材
家居生活
餐饮食品
母婴教育
电脑办公
服装首饰
汽车工具
家电数码
机械化工
休闲美容
热门行业
教育培训
板材
地板
涂料
家纺
集成吊顶
美缝剂
木门
硅藻泥
管材
指纹锁
橱柜
衣柜
床垫
电热水器
集成灶
暖气片
净水器
酒店
卫浴
装修建材
卫浴洁具
板材
地板
建筑陶瓷
天花板
涂料
瓷砖泥瓦
水电管材
火锅
快餐
生活用品
软装
装饰装潢
灯具
家纺
干洗服务
内衣
男装
女装
幼教
整体卫浴
地板砖
阻燃板
铝材
集成吊顶
美缝剂
硅藻泥
管材
烤鱼
汉堡
叶酸
婴儿用品
婴儿床
指纹锁
品牌首页
品牌资讯
企业信息
商标信息
专利信息
返回上一页
专利状态
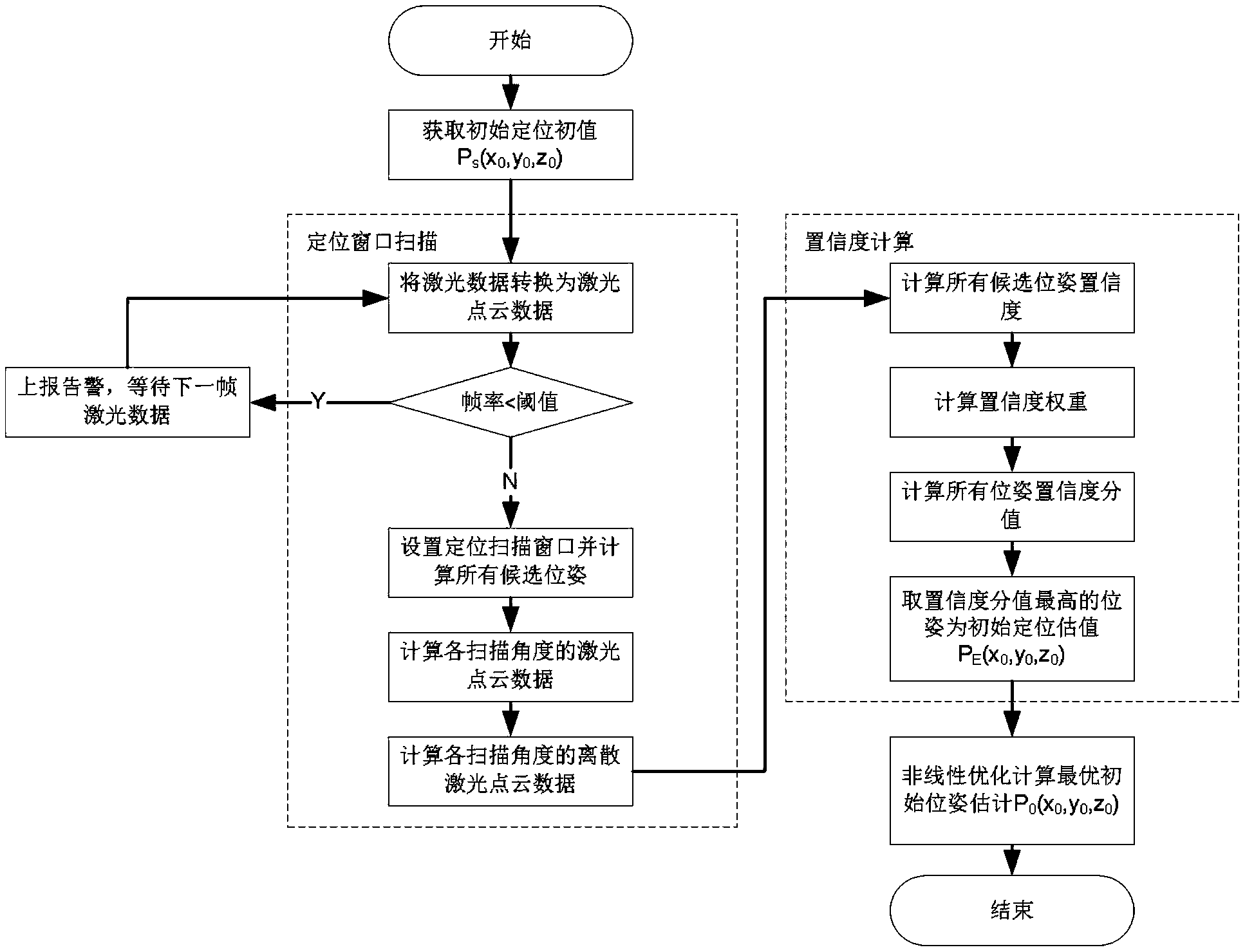
一种基于激光地图的机器人定位初始化方法
有效
专利申请进度
申请
2018-01-18
申请公布
2018-08-28
授权
2020-05-15
预估到期
2038-01-18
专利基础信息
申请号
CN201810052601.5
申请日
2018-01-18
申请公布号
CN108458715A
申请公布日
2018-08-28
授权公布号
CN108458715B
授权公告日
2020-05-15
分类号
G01C21/20
分类
测量;测试;
申请人名称
亿嘉和科技股份有限公司
申请人地址
江苏省南京市雨花台区安德门大街57号
专利法律状态
2020-05-15
授权
状态信息
授权
2018-09-21
实质审查的生效
状态信息
实质审查的生效IPC(主分类):G01C 21/20
2018-08-28
公布
状态信息
公开
摘要
本发明公开了一种基于激光地图的机器人定位初始化方法,包括以下步骤:1)获取初始定位初值;2)根据机器人的初始定位初值和定位扫描窗口大小确定所有可能的候选位姿,根据来自机器人的二维激光传感器的激光数据和地图数据计算各扫描角度下各激光反射点对应的地图栅格在地图坐标系中的坐标,作为各扫描角度的离散扫描数据;3)置信度计算:计算每个候选位姿的置信度与置信度权重的乘积作为当前位姿的置信度分值,取置信度分值最高的候选位姿作为初始定位估值;4)对初始定位估值进行非线性优化计算获得最优初始位姿估计。采用本发明的基于激光地图的机器人定位初始化方法,初始定位的准确性很高,从而提高了机器人的定位精度。
更多专利
1
基于多自由度机械臂的视觉采集标定方法、装置及系统
2
一种机械臂及其机器人
3
一种基于轨道移动机器人的热传导全景成像方法
4
一种AGV底盘及AGV小车
5
变电站拖水带消防机器人
6
一种线夹搭接工具及其线夹及操作方法
7
一种巡检机器人用云台
8
基于更换绝缘子的主线锁固工具
9
一种空中线夹的机械臂定位拆卸方法、装置及存储介质
10
一种列车车底探伤机器人用升降平台
11
室内巡检机器人
12
一种连动式伸缩手臂
13
一种高空带电作业挂线检测方法
14
一种机器人装夹装置
15
控制舱(Z200)
16
一种带电作业机器人的夹线器及其操作方法
17
一种机器人末端对接机构
18
一种风力驱鸟器安装工具及安装方法
19
一种轨道金属齿条
20
挂轨式充电机器人
全国服务热线:
在线客服
1211389656
咨询
商务合作
85926368
咨询
媒体合作
921888730
咨询
在线客服
客服微信号
品牌网官方客服微信
打开微信扫一扫
客服微信
商务合作微信
商务合作详谈
打开微信扫一扫
商务合作
回到顶部
 教育培训
教育培训