首页
品牌
排行
问答
专题
特惠
资讯
展会
百科
热门行业
装修建材
家居生活
餐饮食品
母婴教育
电脑办公
服装首饰
汽车工具
家电数码
机械化工
休闲美容
热门行业
教育培训
板材
地板
涂料
家纺
集成吊顶
美缝剂
木门
硅藻泥
管材
指纹锁
橱柜
衣柜
床垫
电热水器
集成灶
暖气片
净水器
酒店
卫浴
装修建材
卫浴洁具
板材
地板
建筑陶瓷
天花板
涂料
瓷砖泥瓦
水电管材
火锅
快餐
生活用品
软装
装饰装潢
灯具
家纺
干洗服务
内衣
男装
女装
幼教
整体卫浴
地板砖
阻燃板
铝材
集成吊顶
美缝剂
硅藻泥
管材
烤鱼
汉堡
叶酸
婴儿用品
婴儿床
指纹锁
品牌首页
品牌资讯
企业信息
商标信息
专利信息
返回上一页
专利状态
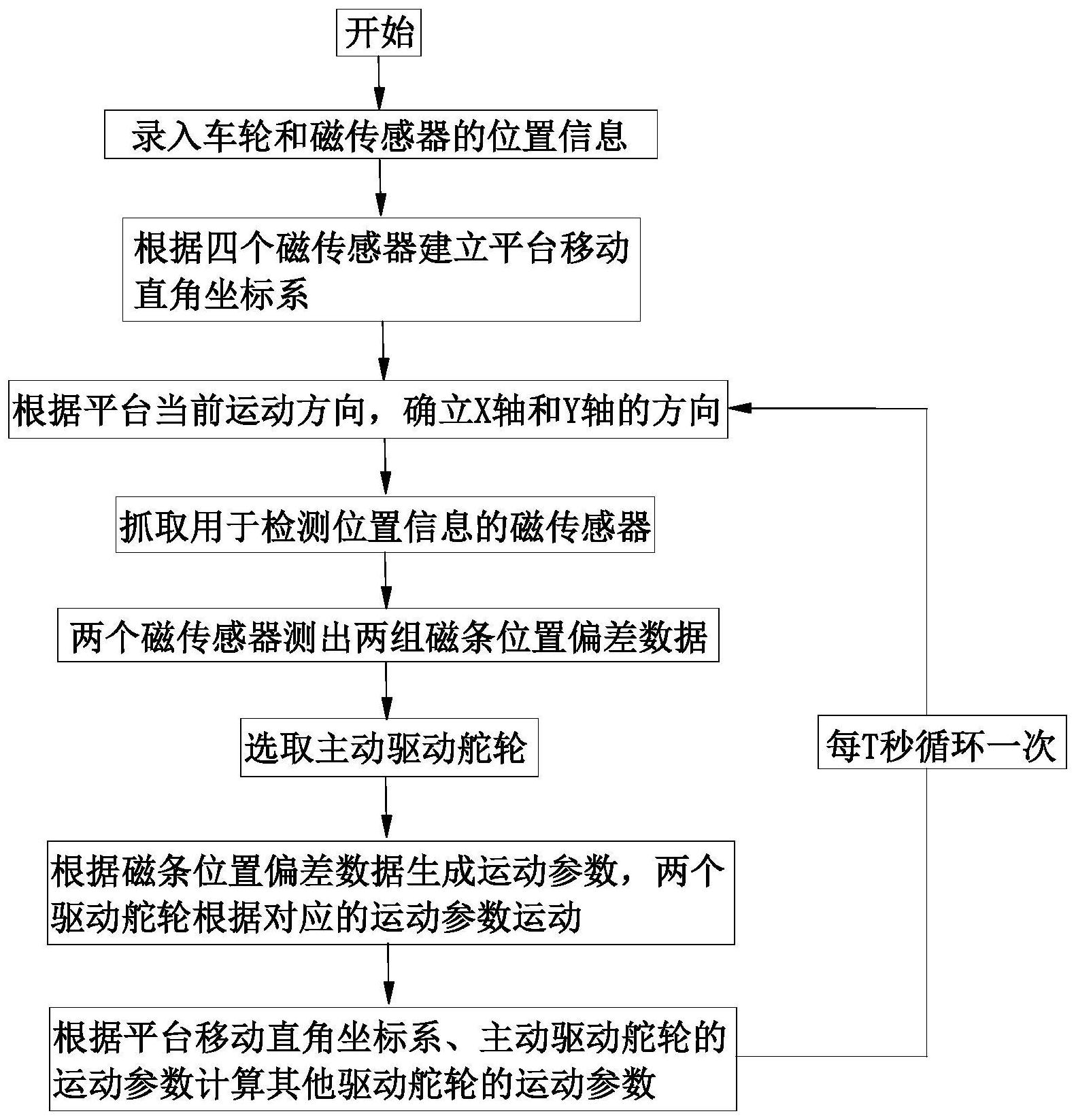
一种控制磁导引多舵轮平台移动的方法
有效
专利申请进度
申请
2019-10-16
申请公布
2020-02-07
授权
2022-12-30
预估到期
2039-10-16
专利基础信息
申请号
CN201910981214.4
申请日
2019-10-16
申请公布号
CN110764502A
申请公布日
2020-02-07
授权公布号
CN110764502B
授权公告日
2022-12-30
分类号
G05D1/02
分类
控制;调节;
申请人名称
广东嘉腾机器人自动化有限公司
申请人地址
广东省佛山市顺德区杏坛镇德进路2号
专利法律状态
2022-12-30
授权
状态信息
授权
2020-02-07
公布
状态信息
公布
摘要
本发明提供一种控制磁导引多舵轮平台移动的方法,包括以下步骤,录入平台底部的若干个驱动舵轮和位于平台底部四周的四个磁传感器的位置信息;建立平台移动直角坐标系和确立X轴和Y轴的方向;根据平台运动方向上的前后两个磁传感器所检测的位置信息,得出两组磁条位置偏差数据;选取两个驱动舵轮作为主动驱动舵轮;根据主动驱动舵轮的位置信息、磁条位置偏差数据生成运动参数,两个主动驱动舵轮根据对应运动参数运动。本发明的一种控制磁导引多舵轮平台移动的方法,能精准协调控制各个驱动舵轮的角度和速度,从而使平台稳定地循迹运动。
更多专利
1
AGV装置
2
一种AGV及AGV驱动自动切换控制方法
3
一种基于子母机器人的装卸货物方法
4
一种AGV对接系统
5
一种高层仓储运输装置
6
一种智能立体仓库储位分配方法
7
一种高度可调的AGV寻磁器装置
8
一种多功能驱动模组及AGV搬运车
9
万向轮起动阻力测试装置
10
牵引式AGV及牵引式AGV与料车的连接方法
11
一种应用于AGV的信号传输电路及电路板
12
一种AGV驱动单元及AGV
13
一种具有灭火功能的AGV电池仓
14
具有自检功能的采集系统
15
通信测试电路及通信测试工具
16
轮系结构及AGV装置
17
AGV充电装置
18
基于广播通信的AGV单机交管方法、电子设备和存储介质
19
AGV调度方法、装置和系统
20
多通道电压信号采集电路及电路板
全国服务热线:
在线客服
1211389656
咨询
商务合作
85926368
咨询
媒体合作
921888730
咨询
在线客服
客服微信号
品牌网官方客服微信
打开微信扫一扫
客服微信
商务合作微信
商务合作详谈
打开微信扫一扫
商务合作
回到顶部
 教育培训
教育培训