首页
品牌
排行
问答
专题
特惠
资讯
展会
百科
热门行业
装修建材
家居生活
餐饮食品
母婴教育
电脑办公
服装首饰
汽车工具
家电数码
机械化工
休闲美容
热门行业
教育培训
板材
地板
涂料
家纺
集成吊顶
美缝剂
木门
硅藻泥
管材
指纹锁
橱柜
衣柜
床垫
电热水器
集成灶
暖气片
净水器
酒店
卫浴
装修建材
卫浴洁具
板材
地板
建筑陶瓷
天花板
涂料
瓷砖泥瓦
水电管材
火锅
快餐
生活用品
软装
装饰装潢
灯具
家纺
干洗服务
内衣
男装
女装
幼教
整体卫浴
地板砖
阻燃板
铝材
集成吊顶
美缝剂
硅藻泥
管材
烤鱼
汉堡
叶酸
婴儿用品
婴儿床
指纹锁
品牌首页
品牌资讯
企业信息
专利信息
返回上一页
专利状态
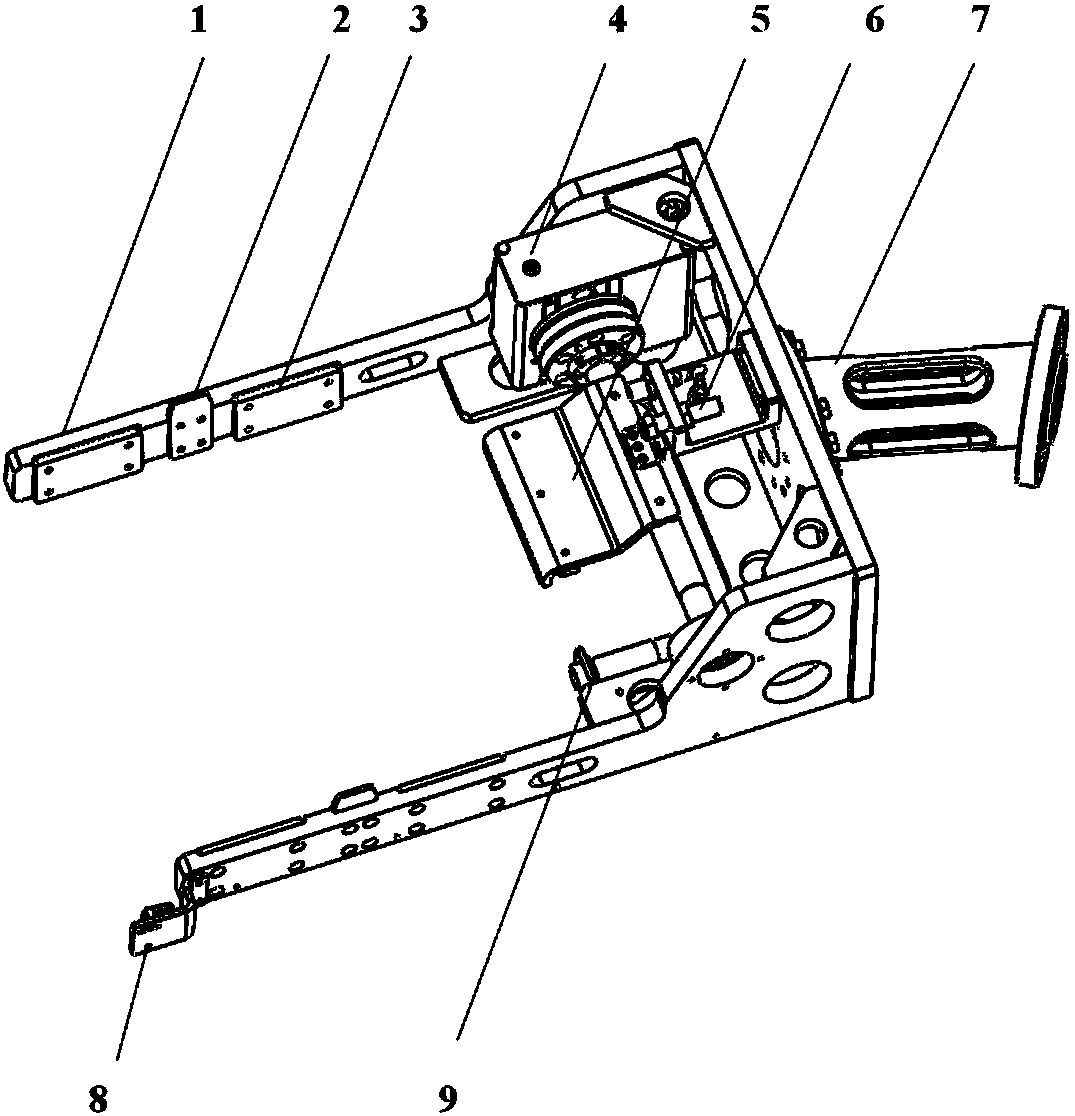
一种周转箱智能拾取机器人手爪
有效
专利申请进度
申请
2018-04-18
授权
2018-11-30
预估到期
2028-04-18
专利基础信息
申请号
CN201820554580.2
申请日
2018-04-18
授权公布号
CN208166034U
授权公告日
2018-11-30
分类号
B65G47/90
分类
输送;包装;贮存;搬运薄的或细丝状材料;
申请人名称
上海发那科机器人有限公司
申请人地址
上海市宝山区富联路1500号
专利法律状态
2018-11-30
授权
状态信息
授权
摘要
本实用新型公开了一种周转箱智能拾取机器人手爪,包括:托铲,托铲包括两铲臂和连接两铲臂的连杆,且连杆的中部设有法兰连接件;定位插销,每一铲臂上均设有若干定位插销;可调节楔形块,每一铲臂上均设有若干可调节楔形块;扣锁装置,扣锁装置与两铲臂可转动连接,扣锁装置设置在两铲臂靠近连杆的一侧;旋转装置,旋转装置设置在一铲臂靠近连杆的一侧,旋转装置驱动扣锁装置旋转。本实用新型的通过定位插销、可调节楔形块能够根据周转箱进行几何形状匹配与定位,消除周转箱形变误差并增加抓取精度。
更多专利
1
一种蜗轮搬运及上下料机器人手爪
2
一种行走轴的防护罩
3
一种管件旋转夹持器及机器人弯管工作站
4
一种基于深度学习的料框内散乱多物体机器人分拣方法
5
一种变间距热冲压伺服抓手
6
一种改善编码器偏心问题的连接装置
7
一种机器人用可调行程浮动切割装置
8
一种机器人自动煮面的系统
9
一种多幅皮带机的控制系统及方法
10
一种带过滤功能的水排分流器
11
一种自动撕砂纸装置
12
一种玻璃限位装置
13
一种铸件清理加工轨迹的自动校正与生成方法
14
一种双手爪
15
一种对接机器人喷涂作业的生产计划管理系统及方法
16
一种适应于工业机器人培训的多功能复合型手爪
17
一种带有触摸屏的多功能激光切割头
18
一种油泵壳机加工搬运机器人三手爪装置
19
一种去除喷漆旋杯静电的装置
20
一种3D视觉纸箱拆垛系统
全国服务热线:
在线客服
1211389656
咨询
商务合作
85926368
咨询
媒体合作
921888730
咨询
在线客服
客服微信号
品牌网官方客服微信
打开微信扫一扫
客服微信
商务合作微信
商务合作详谈
打开微信扫一扫
商务合作
回到顶部
 教育培训
教育培训