首页
品牌
排行
问答
专题
特惠
资讯
展会
百科
热门行业
装修建材
家居生活
餐饮食品
母婴教育
电脑办公
服装首饰
汽车工具
家电数码
机械化工
休闲美容
热门行业
教育培训
板材
地板
涂料
家纺
集成吊顶
美缝剂
木门
硅藻泥
管材
指纹锁
橱柜
衣柜
床垫
电热水器
集成灶
暖气片
净水器
酒店
卫浴
装修建材
卫浴洁具
板材
地板
建筑陶瓷
天花板
涂料
瓷砖泥瓦
水电管材
火锅
快餐
生活用品
软装
装饰装潢
灯具
家纺
干洗服务
内衣
男装
女装
幼教
整体卫浴
地板砖
阻燃板
铝材
集成吊顶
美缝剂
硅藻泥
管材
烤鱼
汉堡
叶酸
婴儿用品
婴儿床
指纹锁
品牌首页
品牌资讯
企业信息
商标信息
专利信息
返回上一页
专利状态
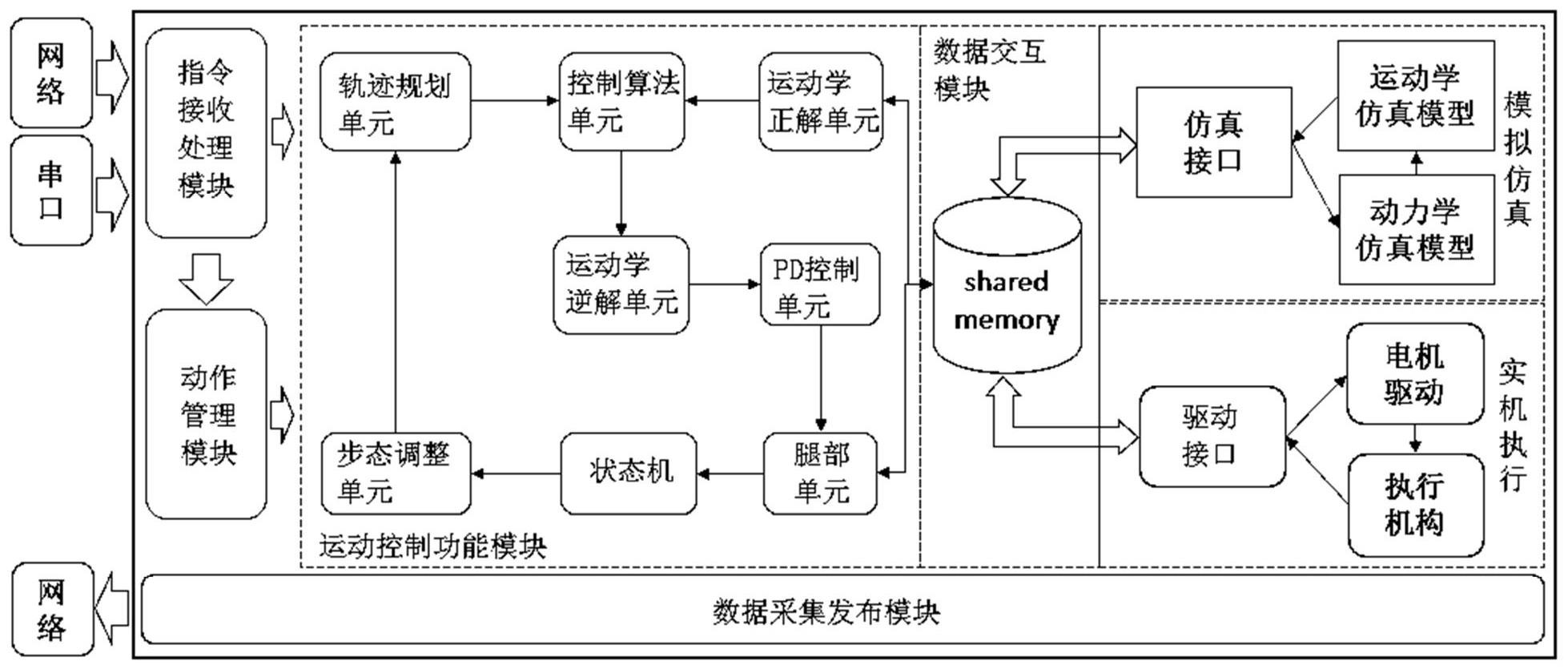
一种四足机器人运动控制系统
有效
专利申请进度
申请
2022-06-15
申请公布
2022-08-23
授权
2023-10-10
预估到期
2042-06-15
专利基础信息
申请号
CN202210678680.7
申请日
2022-06-15
申请公布号
CN114932961A
申请公布日
2022-08-23
授权公布号
CN114932961B
授权公告日
2023-10-10
分类号
B62D57/032
分类
无轨陆用车辆;
申请人名称
中电海康集团有限公司
申请人地址
浙江省杭州市余杭区五常街道爱橙街198号
专利法律状态
2023-10-10
授权
状态信息
授权
2022-10-14
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):B62D57/032;申请日:20220615
2022-08-23
公布
状态信息
公布
摘要
本发明公开了一种四足机器人运动控制系统,包括:指令接收处理模块、动作管理模块、运动控制功能模块、数据交互模块、模拟仿真模块和实机执行模块。本发明提供的四足机器人运动控制系统,实现各模块的独立开发;可通过硬件接入/网络接入等多种控制方式实现运动控制指令的发送,可实时监控机器人状态数据,做问题分析,系统架构清晰,模块耦合度低,系统健壮性好,将算法独立封装为模块,可在不改动其他软件逻辑的情况下,直接验证控制算法,适用于各种基于嵌入式设备的机器人功能开发仿真调试,应用范围广。
更多专利
1
一种陆空两栖机器人
2
可自停止抛光的MRAM器件的制作方法与MRAM器件
3
存储单元及其制备方法、存储器
4
一种宽波段超低反射率的增透膜
5
基于STT-MRAM加速固态存储器件日志文件保存恢复的方法
6
一种基于UWB的割草机器人工作边界建立与识别系统和方法
7
磁性存储器阵列
8
一种基于头戴式AR设备和操作手柄的机器人控制方法
9
磁性隧道结
10
SOT-MRAM存储单元及SOT-MRAM存储器
11
一种医用冷藏箱的快速精确控温方法及医用冷藏箱
12
一种基于双向带宽的和最大的相位差优化方法
13
一种时钟自适应访问MRAM的装置
14
一种智能卡口优化布置方法及装置
15
一种蒸烤箱的恒温控制方法
16
一种教练车的智能防碰撞系统
17
MRAM阵列的测试电路
18
一种融合感知同步曝光方法、装置及可读存储介质
19
一种自对准光刻腐蚀制作存储器的方法
20
一种面向机器人AI算法训练的仿真系统
全国服务热线:
在线客服
1211389656
咨询
商务合作
85926368
咨询
媒体合作
921888730
咨询
在线客服
客服微信号
品牌网官方客服微信
打开微信扫一扫
客服微信
商务合作微信
商务合作详谈
打开微信扫一扫
商务合作
回到顶部
 教育培训
教育培训