首页
品牌
排行
问答
专题
特惠
资讯
展会
百科
热门行业
装修建材
家居生活
餐饮食品
母婴教育
电脑办公
服装首饰
汽车工具
家电数码
机械化工
休闲美容
热门行业
教育培训
板材
地板
涂料
家纺
集成吊顶
美缝剂
木门
硅藻泥
管材
指纹锁
橱柜
衣柜
床垫
电热水器
集成灶
暖气片
净水器
酒店
卫浴
装修建材
卫浴洁具
板材
地板
建筑陶瓷
天花板
涂料
瓷砖泥瓦
水电管材
火锅
快餐
生活用品
软装
装饰装潢
灯具
家纺
干洗服务
内衣
男装
女装
幼教
整体卫浴
地板砖
阻燃板
铝材
集成吊顶
美缝剂
硅藻泥
管材
烤鱼
汉堡
叶酸
婴儿用品
婴儿床
指纹锁
品牌首页
品牌资讯
企业信息
专利信息
返回上一页
专利状态
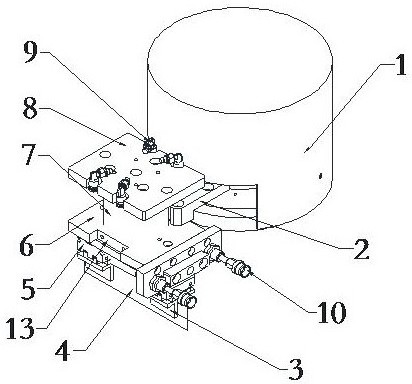
一种用于抓取、装配内存条的机器人抓手
有效
专利申请进度
申请
2020-09-08
授权
2020-11-13
预估到期
2030-09-08
专利基础信息
申请号
CN202021935747.3
申请日
2020-09-08
授权公布号
CN211916872U
授权公告日
2020-11-13
分类号
B25J15/00
分类
手动工具;轻便机动工具;手动器械的手柄;车间设备;机械手;
申请人名称
川崎机器人(天津)有限公司
申请人地址
天津市滨海新区经济技术开发区新环西路19号6号楼一、二层
专利法律状态
2020-11-13
授权
状态信息
授权
摘要
本实用新型公开了用于抓取、装配内存条的机器人抓手,包括:与外部的机器人连接的安装基板、设置在安装基板一侧的相机、安装在安装基板下方的吸盘机构和抓取机构;安装基板的底部设有与吸盘机构连接的连接轴,连接轴的一侧设有连接块,连接块与相机固装;吸盘机构包括支撑板和多个吸盘,支撑板的顶部与连接轴固装,多个吸盘安装在支撑板的端部;抓取机构包括安装板、夹紧气缸和受夹紧气缸驱动的夹爪,夹紧气缸安装在安装板的底部,夹爪与夹紧气缸的输出端连接。通过相机对内存条拍照定位上料工位上的内存条的位置,吸盘吸住水平状态的内存条,机器人驱动内存条抓手旋转,夹爪夹取直立状态的内存条,并插装至内存条的插座内,无需人工插装内存条。
更多专利
1
一种用于阀口袋开袋的机械手
2
机器人用电子产品柔性线穿线抓手
3
一种机械臂与主机连接接口结构
4
机器人辅助操作用便捷摇杆操作盒
5
一种用于辅助纸盒折叠机器人的纸盒封底工装
6
一种纸盒折叠机器人用机械手
7
一种用于高速摄影装置的机械臂
8
指尖陀螺组装生产线
9
大型冲压机间搬运用机器人伺服滑动抓手
10
一种上下料用搬运机器人双工位抓手
11
防腐蚀用机器人控制柜保护罩
12
一种防止工业机器人轴油封处滴油的防护罩
13
一种用于抓取、装配内存条的机器人抓手
14
一种纸盒折叠机器人
15
一种纸盒折叠用机械手
16
一种机器人用滑动夹具
17
食品粮油行业机器人拆垛用快捷抓手
18
一种码垛用工业机器人复合夹具
全国服务热线:
在线客服
1211389656
咨询
商务合作
85926368
咨询
媒体合作
921888730
咨询
在线客服
客服微信号
品牌网官方客服微信
打开微信扫一扫
客服微信
商务合作微信
商务合作详谈
打开微信扫一扫
商务合作
回到顶部
 教育培训
教育培训