首页
品牌
排行
问答
专题
特惠
资讯
展会
百科
热门行业
装修建材
家居生活
餐饮食品
母婴教育
电脑办公
服装首饰
汽车工具
家电数码
机械化工
休闲美容
热门行业
教育培训
板材
地板
涂料
家纺
集成吊顶
美缝剂
木门
硅藻泥
管材
指纹锁
橱柜
衣柜
床垫
电热水器
集成灶
暖气片
净水器
酒店
卫浴
装修建材
卫浴洁具
板材
地板
建筑陶瓷
天花板
涂料
瓷砖泥瓦
水电管材
火锅
快餐
生活用品
软装
装饰装潢
灯具
家纺
干洗服务
内衣
男装
女装
幼教
整体卫浴
地板砖
阻燃板
铝材
集成吊顶
美缝剂
硅藻泥
管材
烤鱼
汉堡
叶酸
婴儿用品
婴儿床
指纹锁
品牌首页
品牌资讯
企业信息
商标信息
专利信息
返回上一页
专利状态
一种无人驾培车辆的紧急避障方法及系统
有效
专利申请进度
申请
2020-09-08
申请公布
2020-12-29
授权
2023-04-14
预估到期
2040-09-08
专利基础信息
申请号
CN202010933104.3
申请日
2020-09-08
申请公布号
CN112148004A
申请公布日
2020-12-29
授权公布号
CN112148004B
授权公告日
2023-04-14
分类号
G05D1/02
分类
控制;调节;
申请人名称
中电海康集团有限公司
申请人地址
浙江省杭州市余杭区文一西路1500号1幢311室
专利法律状态
2023-04-14
授权
状态信息
授权
2020-12-29
公布
状态信息
公布
摘要
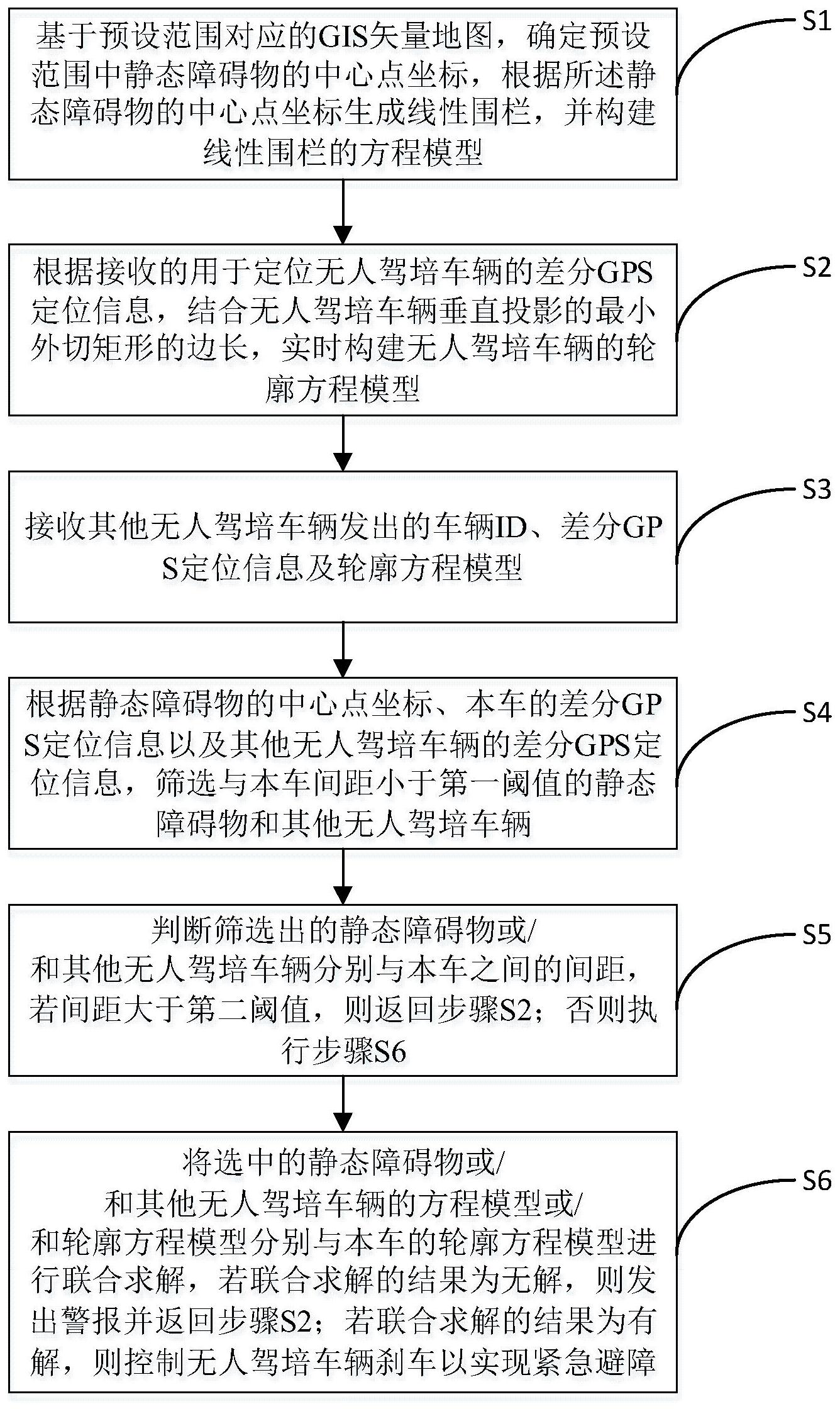
本发明公开了一种无人驾培车辆的紧急避障方法及系统,确定预设范围中静态障碍物的中心点坐标并生成线性围栏,构建线性围栏的方程模型;根据接收的差分GPS定位信息和无人驾培车辆垂直投影的最小外切矩形的边长,构建无人驾培车辆的轮廓方程模型;接收其他无人驾培车辆发出的车辆ID、差分GPS定位信息及轮廓方程模型;根据静态障碍物的中心点坐标、本车的差分GPS定位信息以及其他无人驾培车辆的差分GPS定位信息,筛选对应的静态障碍物和其他无人驾培车辆进行联合求解,若联合求解的结果为有解,则控制无人驾培车辆刹车以实现紧急避障。本发明显著减少无人驾培运营的智能化投入成本,同时保证紧急避障实现的可行性。
更多专利
1
一种基于粒子滤波和卡尔曼滤波的蓝牙定位方法
2
一种基于STT-MRAM加速固态存储器件启动的方法
3
一种基于模糊碰撞概率预测的RFID标签防碰撞方法及系统
4
一种智慧灯杆的防盗报警取证方法及系统
5
基于STT-MRAM加速固态存储器件日志文件保存恢复的方法
6
一种基于边界电磁信号的割草机器人通讯方法和系统
7
一种基于STT-MRAM的固态存储器件随机访问性能提升方法
8
一种实现蓝牙信标beacon和appuart双服务的方法
9
轨道式PLC接口控制器
10
一种辅助机械臂装货的RFID卷布货架
11
磁存储单元及SOT-MRAM存储器
12
一种电子围棋棋盘
13
沟槽填充工艺、半导体器件的制作方法与半导体器件
14
一种扭力检测设备及电驱动轮
15
一种基于城市多源异构数据构建城市画像的方法
16
一种用于物联网平台的设备数据模型生成方法和装置
17
一种基于WebRTC的驾培训练视频通话系统及方法
18
一种增强现实方法、装置和系统
19
存储单元与存储器
20
一种基于菲涅尔透镜的天窗灯
全国服务热线:
在线客服
1211389656
咨询
商务合作
85926368
咨询
媒体合作
921888730
咨询
在线客服
客服微信号
品牌网官方客服微信
打开微信扫一扫
客服微信
商务合作微信
商务合作详谈
打开微信扫一扫
商务合作
回到顶部
 教育培训
教育培训