首页
品牌
排行
问答
专题
特惠
资讯
展会
百科
热门行业
装修建材
家居生活
餐饮食品
母婴教育
电脑办公
服装首饰
汽车工具
家电数码
机械化工
休闲美容
热门行业
教育培训
板材
地板
涂料
家纺
集成吊顶
美缝剂
木门
硅藻泥
管材
指纹锁
橱柜
衣柜
床垫
电热水器
集成灶
暖气片
净水器
酒店
卫浴
装修建材
卫浴洁具
板材
地板
建筑陶瓷
天花板
涂料
瓷砖泥瓦
水电管材
火锅
快餐
生活用品
软装
装饰装潢
灯具
家纺
干洗服务
内衣
男装
女装
幼教
整体卫浴
地板砖
阻燃板
铝材
集成吊顶
美缝剂
硅藻泥
管材
烤鱼
汉堡
叶酸
婴儿用品
婴儿床
指纹锁
品牌首页
品牌资讯
企业信息
商标信息
专利信息
返回上一页
专利状态
一种机器人路径规划方法及系统
有效
专利申请进度
申请
2016-05-26
申请公布
2016-09-21
授权
2021-07-13
预估到期
2036-05-26
专利基础信息
申请号
CN201610362715.0
申请日
2016-05-26
申请公布号
CN105955275A
申请公布日
2016-09-21
授权公布号
CN105955275B
授权公告日
2021-07-13
分类号
G05D1/02
分类
控制;调节;
申请人名称
华讯方舟科技有限公司
申请人地址
广东省深圳市宝安区西乡街道臣田社区臣田工业区37栋404
专利法律状态
2023-08-11
专利申请权、专利权的转移
状态信息
专利权的转移;IPC(主分类):G05D1/02;登记生效日:20230731;变更事项:专利权人;变更前:华讯方舟科技有限公司;变更后:深圳市华讯方舟光电技术有限公司;变更事项:地址;变更前:518000 广东省深圳市宝安区西乡宝田一路臣田工业区37栋1楼;变更后:518000 广东省深圳市宝安区西乡街道臣田社区臣田工业区37栋404
2023-05-16
专利权的保全及其解除
状态信息
专利权保全的解除;IPC(主分类):G05D1/02;申请日:20160526;授权公告日:20210713;解除日:20230421
2021-07-13
授权
状态信息
授权
2018-07-03
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):G05D1/02;申请日:20160526
2016-09-21
公布
状态信息
公布
摘要
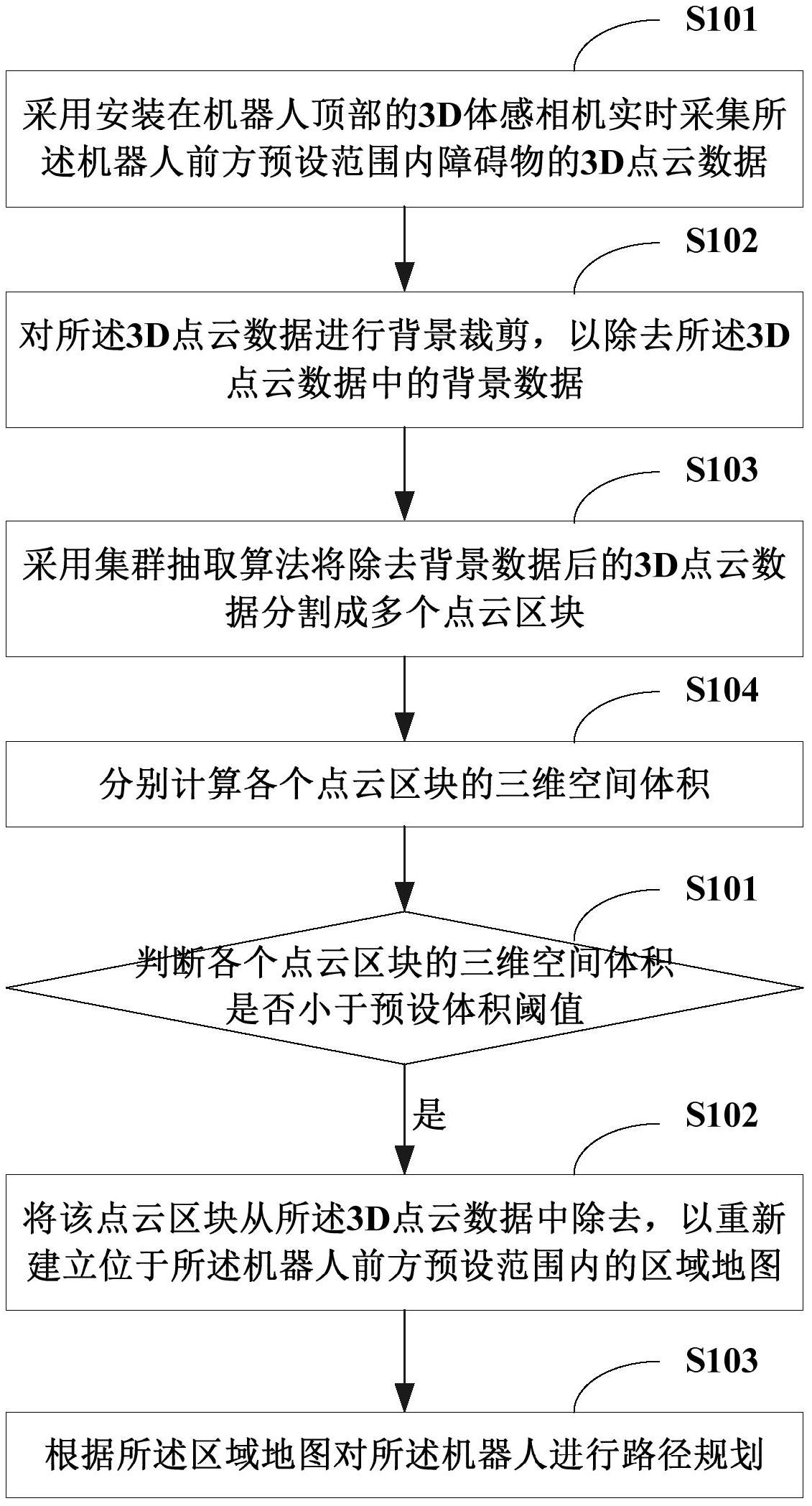
本发明提供一种机器人路径规划方法及系统,涉及电子技术领域。该方法包括:采用安装在机器人顶部的3D体感相机实时采集机器人前方预设范围内障碍物的3D点云数据;对3D点云数据进行背景裁剪,以除去3D点云数据中的背景数据;采用集群抽取算法将除去背景数据后的3D点云数据分割成多个点云区块;分别计算各个点云区块的三维空间体积;判断各个点云区块的三维空间体积是否小于预设体积阈值;若小于预设体积阈值,则将该点云区块从所述3D点云数据中除去,以重新建立位于机器人前方预设范围内的区域地图;根据区域地图进行路径规划。本发明能够提高机器人的整体路径规划能力,使机器人在进行路径规划时忽略体积小的障碍物,为机器人规划出最优路径。
更多专利
1
微波变频器PCBA板辅助焊接装置
2
一种通信接收装置以及毫米波接收设备
3
一种图像质量分类方法、系统及终端设备
4
一种机器人头部关节舵机位置的校准方法、装置及机器人
5
一种智能语音对话的方法和装置
6
一种太赫兹光谱仪
7
针脚焊接治具
8
一种基于毫米波图像的人体异物检测方法及系统
9
人体扫描图像处理方法、设备及计算机可读存储介质
10
一种回转装置以及卫星天线
11
一种用于微波类PCBA的测试系统
12
托架载具
13
人体识别和定位的方法、机器人及特征衣服
14
单导波管(KS6417)
15
一种适合宽带调谐的压控振荡器
16
卫星便携天线
17
太赫兹内窥镜系统
18
一种机器人路径规划方法及系统
19
基于太赫兹的水蒸气检测系统及检测方法
全国服务热线:
在线客服
1211389656
咨询
商务合作
85926368
咨询
媒体合作
921888730
咨询
在线客服
客服微信号
品牌网官方客服微信
打开微信扫一扫
客服微信
商务合作微信
商务合作详谈
打开微信扫一扫
商务合作
回到顶部
 教育培训
教育培训