首页
品牌
排行
问答
专题
特惠
资讯
展会
百科
热门行业
装修建材
家居生活
餐饮食品
母婴教育
电脑办公
服装首饰
汽车工具
家电数码
机械化工
休闲美容
热门行业
教育培训
板材
地板
涂料
家纺
集成吊顶
美缝剂
木门
硅藻泥
管材
指纹锁
橱柜
衣柜
床垫
电热水器
集成灶
暖气片
净水器
酒店
卫浴
装修建材
卫浴洁具
板材
地板
建筑陶瓷
天花板
涂料
瓷砖泥瓦
水电管材
火锅
快餐
生活用品
软装
装饰装潢
灯具
家纺
干洗服务
内衣
男装
女装
幼教
整体卫浴
地板砖
阻燃板
铝材
集成吊顶
美缝剂
硅藻泥
管材
烤鱼
汉堡
叶酸
婴儿用品
婴儿床
指纹锁
品牌首页
品牌资讯
企业信息
商标信息
专利信息
返回上一页
专利状态
一种无人驾驶列车自动折返控制方法
有效
专利申请进度
申请
2018-04-12
申请公布
2018-10-02
授权
2020-10-20
预估到期
2038-04-12
专利基础信息
申请号
CN201810326596.2
申请日
2018-04-12
申请公布号
CN108609037A
申请公布日
2018-10-02
授权公布号
CN108609037B
授权公告日
2020-10-20
分类号
B61L27/04
分类
铁路;
申请人名称
浙江众合科技股份有限公司
申请人地址
浙江省杭州市滨江区江汉路1785号双城国际4号楼17层
专利法律状态
2020-10-20
授权
状态信息
授权
2018-10-30
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):B61L 27/04;专利申请号:2018103265962;申请日:20180412
2018-10-02
发明专利申请公布
状态信息
公布
摘要
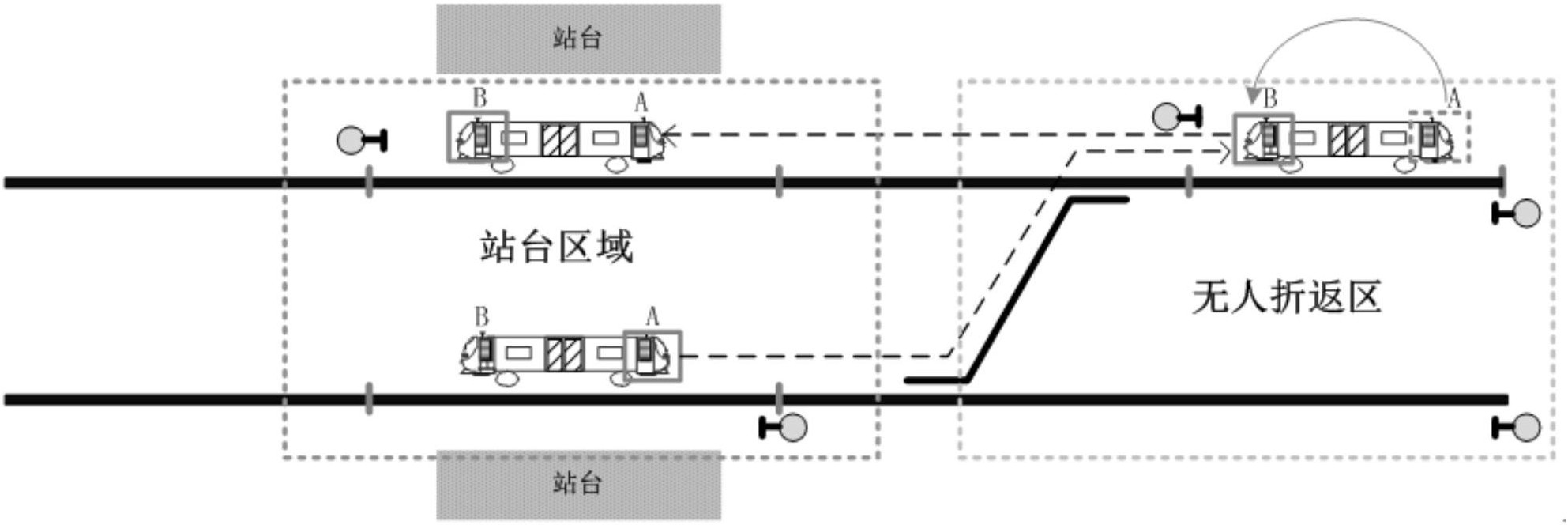
本发明公开了一种无人驾驶列车自动折返控制方法,在列车的A、B两端各布置一套车载控制系统,A端车载控制系统控制列车到无人折返区停车后,执行如下步骤:步骤S1,对B端车载控制系统的健康状态以及与B端车载控制系统的网络连接状态进行监督;步骤S2,如果都正常,则执行默认的换端操作,将控制权交于B端车载控制系统;步骤S3,如果二者有任一条件不满足,则执行不换端策略,由A端车载控制系统继续控制列车,采用反向推行的方式将列车从无人折返区推到站台停准,再交由司机上车处理。本发明在未增加系统硬件成本的基础上,大幅提升了无人自动折返的可用性,降低了运营阻塞和无人折返区人工救援风险。
更多专利
1
一种应用于安全计算机的输出控制系统
2
基于规则推荐算法的精准短时客流预测模型
3
一种便携式地铁车地通信检测装置
4
一种列车的制动控制方法
5
基于既有CBTC系统辅助防护的列车无人化出入段场方法
6
一种可列车自主控制的智能转辙机
7
全电子联锁系统故障后安全点亮铁路信号机禁止灯的装置
8
一种基于逆变技术的正弦波信号发生装置
9
一种可自动调整姿态的地铁无人驾驶台
10
一种SIL4设备保持网口安全输出的方法和系统及电子设备
11
一种新型机框面板提手
12
一种用于自助设备出钞或出票的自动闸门装置
13
一种无人驾驶列车地图数据的加载方法及电子设备
14
用于控制转辙机的检测电路
15
一种纸币换向传送机构
16
基于ATS时刻表运营管理的多保护区段自动选择方法
17
可自动调整姿态的地铁无人驾驶控制台
18
一种基于INA200的低功耗电子自恢复保险丝电路
19
一种自助设备终端的闸门装置
20
一种基于像素块回检的安全显示检测方法
全国服务热线:
在线客服
1211389656
咨询
商务合作
85926368
咨询
媒体合作
921888730
咨询
在线客服
客服微信号
品牌网官方客服微信
打开微信扫一扫
客服微信
商务合作微信
商务合作详谈
打开微信扫一扫
商务合作
回到顶部
 教育培训
教育培训