首页
品牌
排行
问答
专题
特惠
资讯
展会
百科
热门行业
装修建材
家居生活
餐饮食品
母婴教育
电脑办公
服装首饰
汽车工具
家电数码
机械化工
休闲美容
热门行业
教育培训
板材
地板
涂料
家纺
集成吊顶
美缝剂
木门
硅藻泥
管材
指纹锁
橱柜
衣柜
床垫
电热水器
集成灶
暖气片
净水器
酒店
卫浴
装修建材
卫浴洁具
板材
地板
建筑陶瓷
天花板
涂料
瓷砖泥瓦
水电管材
火锅
快餐
生活用品
软装
装饰装潢
灯具
家纺
干洗服务
内衣
男装
女装
幼教
整体卫浴
地板砖
阻燃板
铝材
集成吊顶
美缝剂
硅藻泥
管材
烤鱼
汉堡
叶酸
婴儿用品
婴儿床
指纹锁
品牌首页
品牌资讯
企业信息
商标信息
专利信息
返回上一页
专利状态
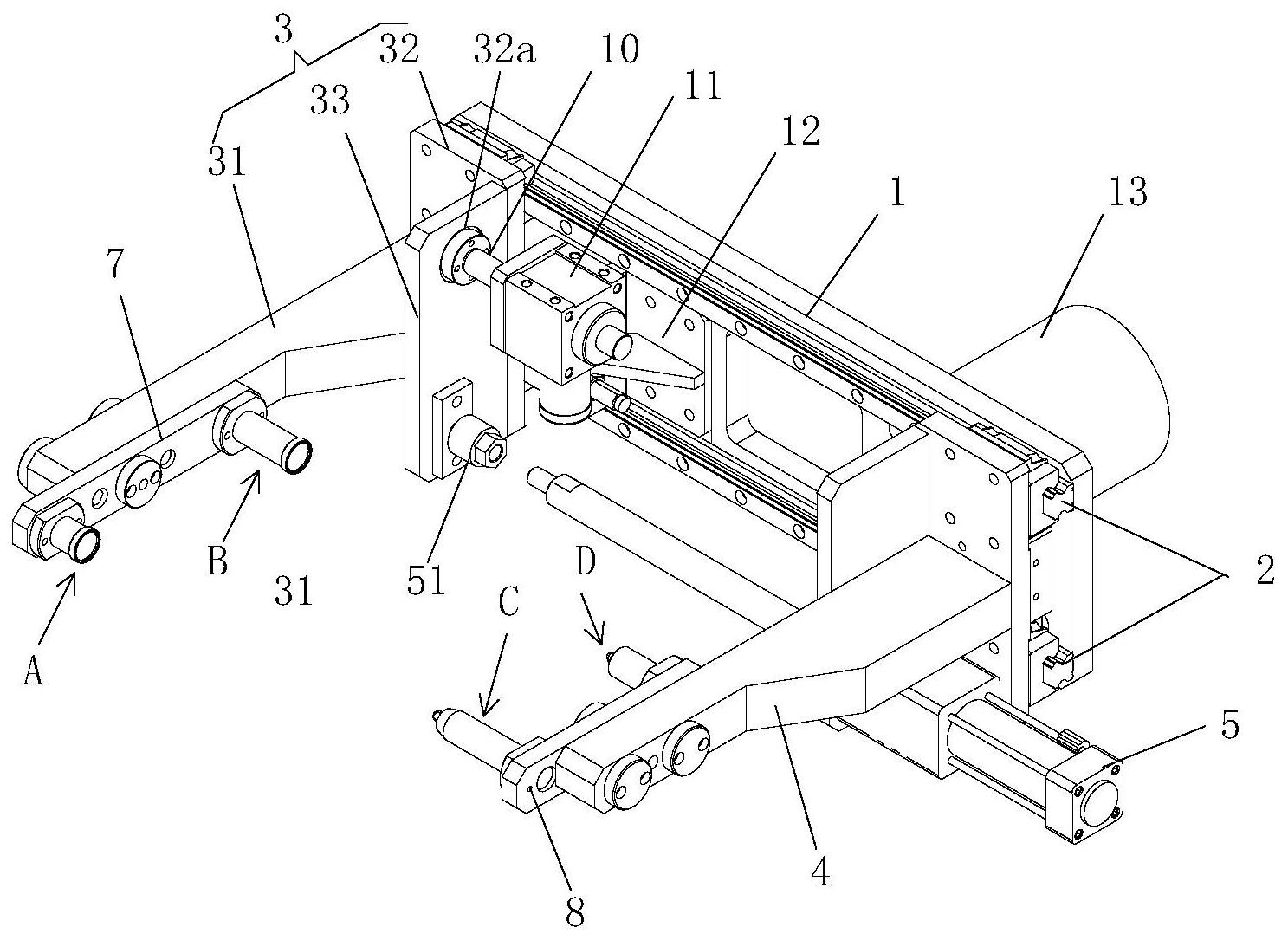
一种异形工件翻转自动锁紧消隙机构
有效
专利申请进度
申请
2018-08-28
申请公布
2018-12-11
授权
2021-10-08
预估到期
2038-08-28
专利基础信息
申请号
CN201810989326.X
申请日
2018-08-28
申请公布号
CN108971926A
申请公布日
2018-12-11
授权公布号
CN108971926B
授权公告日
2021-10-08
分类号
B23P19/00;B25B11/02
分类
机床;不包含在其他类目中的金属加工;
申请人名称
安徽巨一科技股份有限公司
申请人地址
安徽省合肥市包河区繁华大道5821号
专利法律状态
2021-10-08
授权
状态信息
授权
2021-09-17
专利申请权、专利权的转移
状态信息
专利申请权的转移;IPC(主分类):B23P19/00;登记生效日:20210907;变更事项:申请人;变更前:合肥巨一智能装备有限公司;变更后:安徽巨一科技股份有限公司;变更事项:地址;变更前:230051 安徽省合肥市包河工业区上海路东大连路北;变更后:230000 安徽省合肥市包河区繁华大道5821号
2019-01-04
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):B23P19/00;申请日:20180828
2018-12-11
公布
状态信息
公布
摘要
本发明公开了一种异形工件翻转自动锁紧消隙机构,包括滑台板、第一抱爪臂、第二抱爪臂、气缸、第一缓冲死挡组件、以及第二缓冲死挡组件,还包括锁紧单元,用于在第一抱爪臂和第二抱爪臂抱紧异形工件后锁紧所述第一抱爪臂和滑台板二者之间的相对位置,以消除异形工件在翻转过程中相对于滑台板的位置移动。本发明应用于异形工件例如异形壳体或异形总成的翻转功能上,在抱爪合抱待翻转壳体总成时,自动锁紧抱爪臂,解决合抱翻转时由于异形工件加工误差导致的左右间隙晃动、翻转后相对位置不定这类情况。
更多专利
1
一种托盘用定位装置
2
一种发动机缸盖气门锁片压装装置及其弹夹组件
3
一种变速箱钢球压装机构
4
一种锂电池电芯自动叠盘式收料设备
5
一种挖掘机X架自动组队柔性定位工装
6
一种齿轴柔性自动啮合方法、机构和变速箱轴系拼装装置
7
举升装置
8
一种飞轮连接板压装机构及压装系统
9
一种商用车换电站
10
一种轴承真空加脂机构
11
辊刀制痕装置
12
一种简便手持移载工装
13
一种铁路扣件系统维护作业装置和螺栓拆解机构
14
一种移动换电车
15
一种电动汽车换电检测装置
16
一种硬质孔卡安装检测装置
17
一种多车型车门对中装置
18
一种内卡簧槽测量装置
19
一种同步均力等速变径筒体内撑圆机构
20
一种汇流排焊接自动补偿装置
全国服务热线:
在线客服
1211389656
咨询
商务合作
85926368
咨询
媒体合作
921888730
咨询
在线客服
客服微信号
品牌网官方客服微信
打开微信扫一扫
客服微信
商务合作微信
商务合作详谈
打开微信扫一扫
商务合作
回到顶部
 教育培训
教育培训