首页
品牌
排行
问答
专题
特惠
资讯
展会
百科
热门行业
装修建材
家居生活
餐饮食品
母婴教育
电脑办公
服装首饰
汽车工具
家电数码
机械化工
休闲美容
热门行业
教育培训
板材
地板
涂料
家纺
集成吊顶
美缝剂
木门
硅藻泥
管材
指纹锁
橱柜
衣柜
床垫
电热水器
集成灶
暖气片
净水器
酒店
卫浴
装修建材
卫浴洁具
板材
地板
建筑陶瓷
天花板
涂料
瓷砖泥瓦
水电管材
火锅
快餐
生活用品
软装
装饰装潢
灯具
家纺
干洗服务
内衣
男装
女装
幼教
整体卫浴
地板砖
阻燃板
铝材
集成吊顶
美缝剂
硅藻泥
管材
烤鱼
汉堡
叶酸
婴儿用品
婴儿床
指纹锁
品牌首页
品牌资讯
企业信息
商标信息
专利信息
返回上一页
专利状态
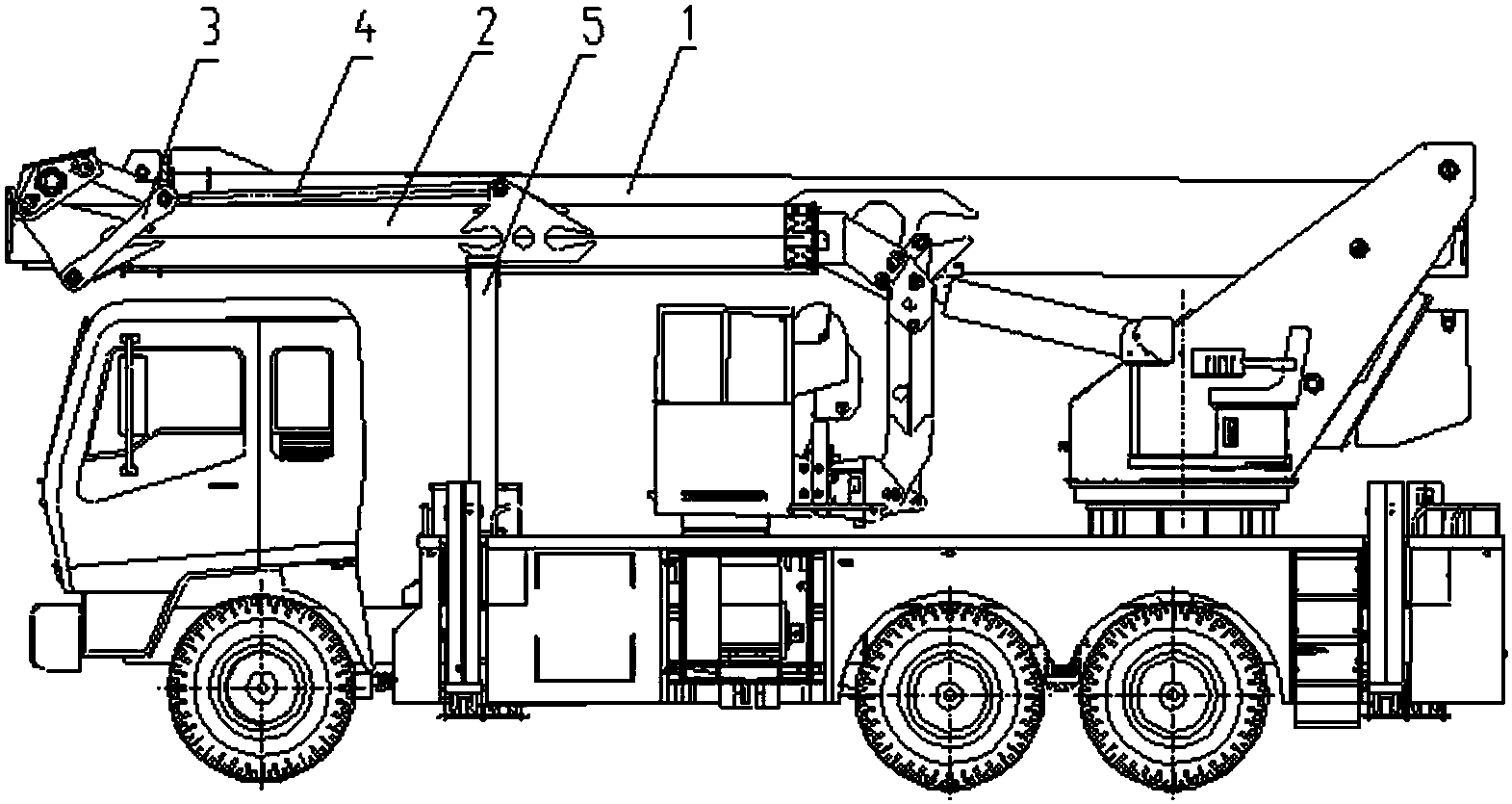
一种基于混合臂的防臂下落控制方法
有效
专利申请进度
申请
2016-09-27
申请公布
2017-03-08
授权
2018-08-07
预估到期
2036-09-27
专利基础信息
申请号
CN201610852854.1
申请日
2016-09-27
申请公布号
CN106477489A
申请公布日
2017-03-08
授权公布号
CN106477489B
授权公告日
2018-08-07
分类号
B66F11/04;B66F17/00
分类
卷扬;提升;牵引;
申请人名称
徐州海伦哲专用车辆股份有限公司
申请人地址
江苏省徐州市螺山路19号
专利法律状态
2018-08-07
授权
状态信息
授权
2017-04-05
实质审查的生效
状态信息
实质审查的生效IPC(主分类):B66F 11/04申请日:20160927
2017-03-08
公布
状态信息
公开
摘要
一种基于混合臂的防臂下落控制方法,包括以下步骤:步骤一:举升作业时,判断混合臂与臂支架的接触状况;步骤二:向一级臂发出起臂信号,一级臂在收到起臂信号后会向二级臂发出收拢信号;步骤三:二级臂在收拢的过程中,同步检测一级臂与二级臂的相对空间状态;步骤四:若偏离,则执行步骤五,若未发生偏离,则执行步骤七;步骤五:使二级臂进行回收;步骤六:二级臂达到锁定的空间状态时,执行步骤七;步骤七:使二级臂达到锁定状态;步骤八:混合臂到达设定的安全区域后,解除二级臂的锁定状态,根据控制命令,使一级臂、二级臂进行正常的举升作业。该方法能避免因二级臂发生掉落,导致损坏车辆和附属装置甚至是人员伤亡事故的发生。
更多专利
1
电源车主馈出电缆终端接头护套
2
一种用于测量箱体内部形位公差的检测装置
3
一种新型底盘大梁钻孔工装
4
一种多自由度运动的混合臂型高空作业车
5
一种低压汇流母排夹
6
一种车载式绝缘绳试验装置
7
一种具有行车除湿功能的电力抢修车
8
一种带电水冲洗专用水枪
9
一种电力引下电缆固定装置
10
一种活动支腿联动伸缩装置及其伸缩方法和高空作业车
11
一种轻便型新能源照明车
12
一种高压试验车厢体
13
高空应急架设穿越公路线状设施的作业方法
14
一种应急排水抢险车
15
20kV中压应急发电车
16
一种高空作业车的工作斗调平系统
17
一种带称重的新型托架结构
18
一种基于混合臂的防臂下落控制方法
19
一种排水车用水带存放装置
20
一种防止臂自动外伸的装置
全国服务热线:
在线客服
1211389656
咨询
商务合作
85926368
咨询
媒体合作
921888730
咨询
在线客服
客服微信号
品牌网官方客服微信
打开微信扫一扫
客服微信
商务合作微信
商务合作详谈
打开微信扫一扫
商务合作
回到顶部
 教育培训
教育培训