首页
品牌
排行
问答
专题
特惠
资讯
展会
百科
热门行业
装修建材
家居生活
餐饮食品
母婴教育
电脑办公
服装首饰
汽车工具
家电数码
机械化工
休闲美容
热门行业
教育培训
板材
地板
涂料
家纺
集成吊顶
美缝剂
木门
硅藻泥
管材
指纹锁
橱柜
衣柜
床垫
电热水器
集成灶
暖气片
净水器
酒店
卫浴
装修建材
卫浴洁具
板材
地板
建筑陶瓷
天花板
涂料
瓷砖泥瓦
水电管材
火锅
快餐
生活用品
软装
装饰装潢
灯具
家纺
干洗服务
内衣
男装
女装
幼教
整体卫浴
地板砖
阻燃板
铝材
集成吊顶
美缝剂
硅藻泥
管材
烤鱼
汉堡
叶酸
婴儿用品
婴儿床
指纹锁
品牌首页
品牌资讯
企业信息
商标信息
专利信息
返回上一页
专利状态
一种车辆自主驾驶横向控制方法
有效
专利申请进度
申请
2023-04-07
申请公布
2023-05-09
授权
2023-07-14
预估到期
2043-04-07
专利基础信息
申请号
CN202310366227.7
申请日
2023-04-07
申请公布号
CN116080754A
申请公布日
2023-05-09
授权公布号
CN116080754B
授权公告日
2023-07-14
分类号
B62D6/00;B62D137/00N
分类
无轨陆用车辆;
申请人名称
常州星宇车灯股份有限公司
申请人地址
江苏省常州市新北区汉江路398号
专利法律状态
2023-07-14
授权
状态信息
授权
2023-05-26
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):B62D6/00;申请日:20230407
2023-05-09
公布
状态信息
公布
摘要
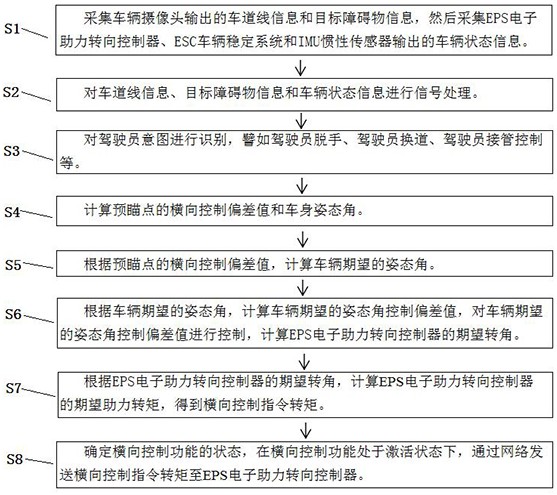
本发明公开了一种车辆自主驾驶横向控制方法,它包括:步骤S1、采集车辆摄像头输出的车道线信息和目标障碍物信息,然后采集EPS电子助力转向控制器、ESC车辆稳定系统和IMU惯性传感器输出的车辆状态信息;步骤S2、对车道线信息、目标障碍物信息和车辆状态信息进行信号处理;步骤S3、对驾驶员意图进行识别;步骤S4、计算预瞄点的横向控制偏差值和车身姿态角;步骤S5、根据预瞄点的横向控制偏差值,计算车辆期望的姿态角;步骤S6、根据车辆期望的姿态角,计算车辆期望的姿态角控制偏差值。本发明提供一种车辆自主驾驶横向控制方法,保证车辆行驶在满足特定条件的车道线内,安全且高效。
更多专利
1
一种用于单色成型机的双层旋转注塑模具结构
2
汽车接插件
3
聚光效果好的厚壁光学模组及车灯系统
4
前照灯、前照灯的减振控制方法和车辆
5
一种透镜单元
6
浮动型自动对插装置
7
一种灯具故障反馈电路
8
一种调整螺母锁付单品高度检测装置
9
一种车灯用新型透镜灯模块
10
基于时间管理策略实现LED动态控制的车灯系统
11
高效率出光的厚壁件
12
防反接保护电路及其汽车灯具
13
一种汽车A柱mini-LED交互灯
14
车内A柱超车辅助警告灯
15
一种LED尾灯电路的故障监测系统及监测处理方法
16
镜头模组及使用其的像素照明装置和车灯
17
汽车日行灯
18
车内灯光集中管理显示屏
19
聚光器以及使用该聚光器的车灯模组
20
车辆自适应巡航控制装置及控制方法
全国服务热线:
在线客服
1211389656
咨询
商务合作
85926368
咨询
媒体合作
921888730
咨询
在线客服
客服微信号
品牌网官方客服微信
打开微信扫一扫
客服微信
商务合作微信
商务合作详谈
打开微信扫一扫
商务合作
回到顶部
 教育培训
教育培训