首页
品牌
排行
问答
专题
特惠
资讯
展会
百科
热门行业
装修建材
家居生活
餐饮食品
母婴教育
电脑办公
服装首饰
汽车工具
家电数码
机械化工
休闲美容
热门行业
教育培训
板材
地板
涂料
家纺
集成吊顶
美缝剂
木门
硅藻泥
管材
指纹锁
橱柜
衣柜
床垫
电热水器
集成灶
暖气片
净水器
酒店
卫浴
装修建材
卫浴洁具
板材
地板
建筑陶瓷
天花板
涂料
瓷砖泥瓦
水电管材
火锅
快餐
生活用品
软装
装饰装潢
灯具
家纺
干洗服务
内衣
男装
女装
幼教
整体卫浴
地板砖
阻燃板
铝材
集成吊顶
美缝剂
硅藻泥
管材
烤鱼
汉堡
叶酸
婴儿用品
婴儿床
指纹锁
品牌首页
品牌资讯
企业信息
商标信息
专利信息
返回上一页
专利状态
一种多传感器系统误差在线估计和数据融合方法
有效
专利申请进度
申请
2020-01-20
申请公布
2020-05-15
授权
2022-01-25
预估到期
2040-01-20
专利基础信息
申请号
CN202010062265.X
申请日
2020-01-20
申请公布号
CN111157969A
申请公布日
2020-05-15
授权公布号
CN111157969B
授权公告日
2022-01-25
分类号
G01S7/41
分类
测量;测试;
申请人名称
四川九洲电器集团有限责任公司
申请人地址
四川省绵阳市科创园区九华路6号
专利法律状态
2022-01-25
授权
状态信息
授权
2020-05-15
公布
状态信息
公布
摘要
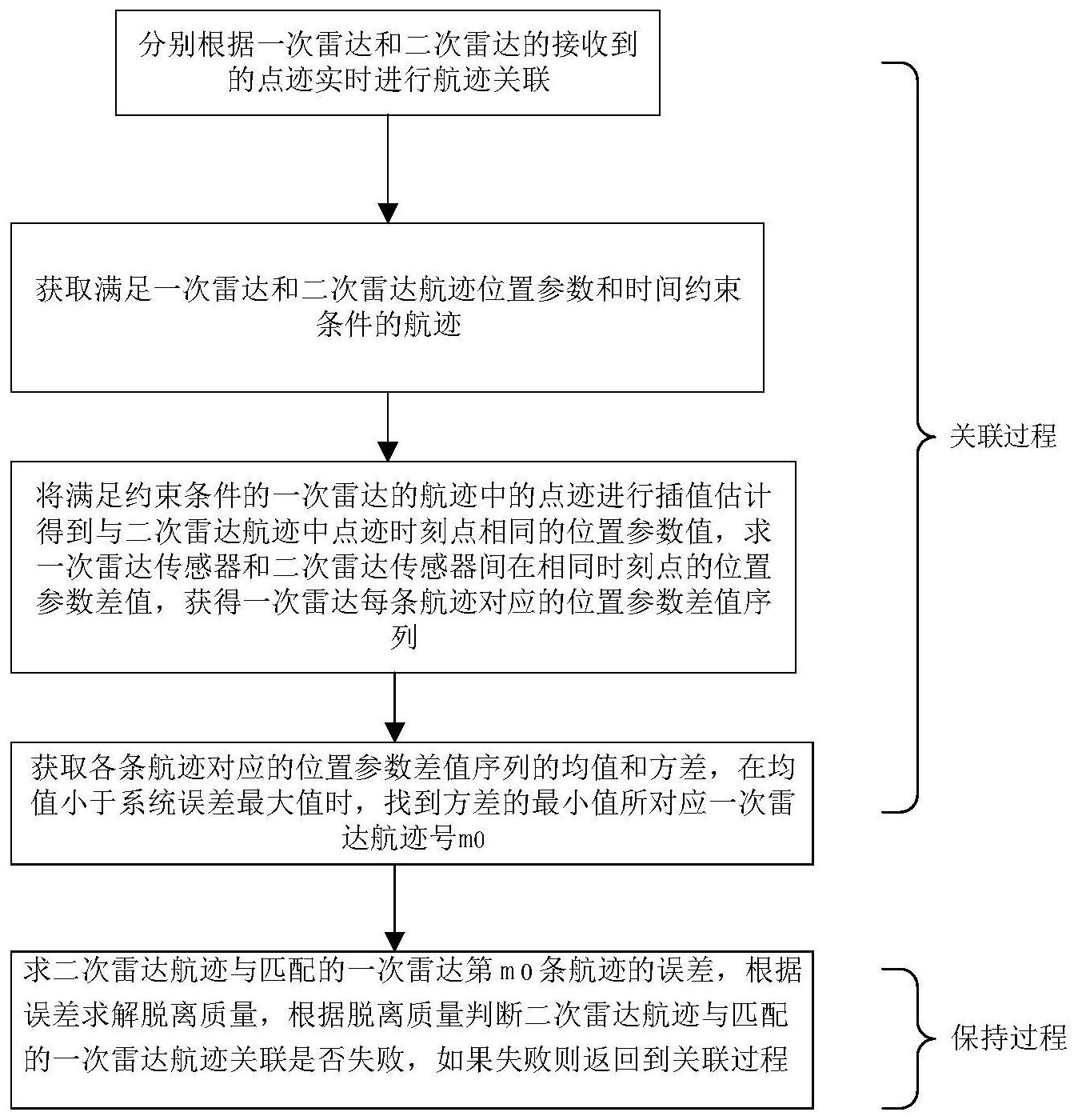
本发明公开了一种多传感器系统误差在线估计和数据融合方法。包括关联过程和保持过程:关联过程中,根据一次雷达和二次雷达的接收到的点迹实时进行航迹关联;进行一次雷达传感器和二次雷达传感器航迹的融合:针对二次雷达传感器的某条航迹,依次求一次雷达传感器的每条航迹与此二次雷达传感器航迹的距离差值序列;获取一次雷达传感器各条航迹对应的距离差值序列的均值和方差,在均值小于系统误差最大值时,找到方差的最小值所对应一次雷达航迹号m0;保持过程中,求二次雷达航迹与匹配的一次雷达第m0条航迹的误差,根据误差求解脱离质量,进而判断二次雷达航迹与匹配的一次雷达航迹关联是否失败。该方案能实时在线估计不同传感器间的系统误差,提升二次雷达的识别能力。
更多专利
1
基于景深补偿的视差图像拼接方法
2
一种小尺寸印制板选择性波峰焊焊接工装
3
一种低成本数字信号处理模块自动测试装置和方法
4
一种数据卡防水卡座
5
一种料包码垛装车机的叠包装置
6
一种突发MSK直扩通信同步检测装置及方法
7
一种中频接收机单通道电路和宽中频接收机
8
蜂群无人机数量估计和航迹生成方法
9
一种内凹转角型面结构件加工T型刀装置
10
一种货物自动摆正机构
11
一种用于工件局部电镀的装置
12
一种用于端面棘轮加工的夹具
13
一种抗大量级振动的风扇减震支座
14
一种信息处理方法及测控系统
15
一种多雷达航迹融合方法
16
一种内藏式车辆阻拦装置及其使用方法
17
深度卷积神经网络的轻量化方法、系统及目标检测方法
18
一种用于橡胶垫片切割尺寸的快速调节装置
19
一种VHF、UHF频段航空电台信号的侦收设备
20
一种宽带小步进频率源
全国服务热线:
在线客服
1211389656
咨询
商务合作
85926368
咨询
媒体合作
921888730
咨询
在线客服
客服微信号
品牌网官方客服微信
打开微信扫一扫
客服微信
商务合作微信
商务合作详谈
打开微信扫一扫
商务合作
回到顶部
 教育培训
教育培训